前言
之前一直有整理几年来所看所学的深度学习 / 机器学习知识的想法,但是总会因为各种各样的原因耽搁,今天决定开坑,从头把这些知识梳理一下,先想到哪里写哪里,框架先搭好,后面在回顾过程中逐渐完善。
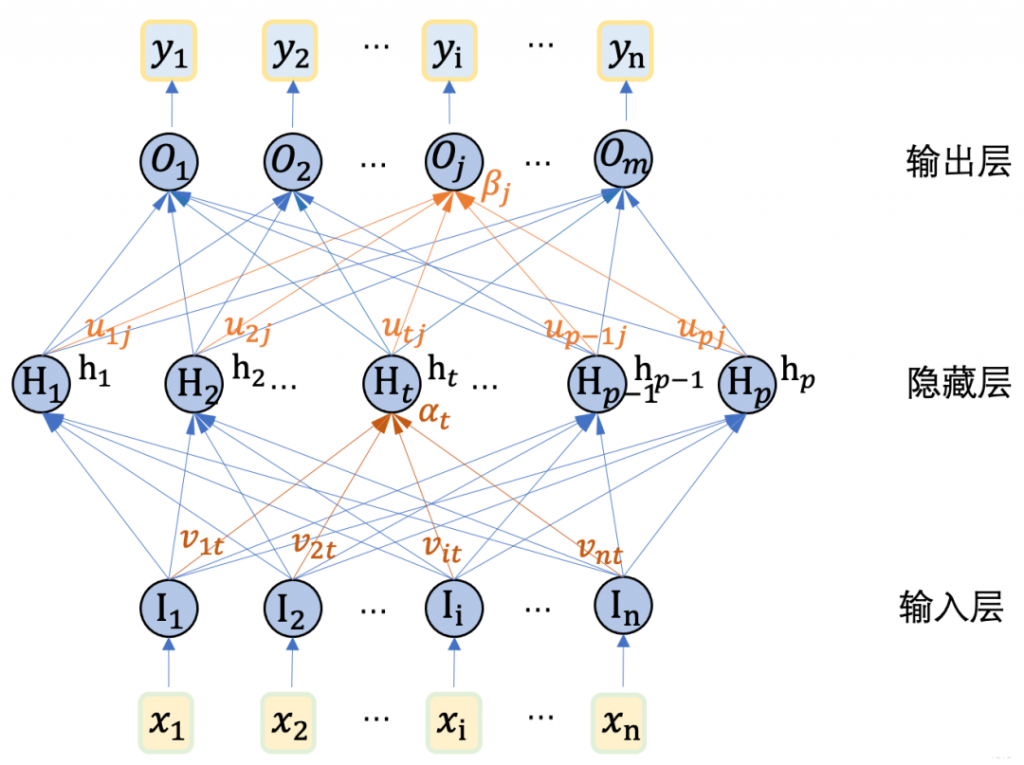
前馈神经网络(Forward Neural Network, FNN)
FNN 是最基础的神经网络模型。由输入层、若干隐藏层和输出层组成。隐藏层里有若干个神经元,将输入进行“加工”,最终得到输出。
多层感知机(Multilayer Perceptron, MLP)
每个神经元与前后层的所有神经元都相连(全连接),可以说由若干个全连接层堆叠而成,但是多层感知机的隐藏层里面,还有激活函数(非线性变换)。
想象你要做一道多步骤的手工艺品:
- 拿到原料(输入),
- 经过第一个工序(第一层神经元)做简单加工,
- 得到半成品,再交给第二个工序(第二层神经元),
- 如此依次推进,直到最后一步拿到成品(输出)。
在这个“流水线”里,原料永远只往前流,不会回头修改;每道工序只关心它收到的半成品如何变得更好。前馈神经网络就是这样一个没有反馈、不形成循环的多层“加工”结构。
(由 GPT-o4 给出解释)
激活函数
激活函数就相当于对这一层神经元的输出做一次非线性的变换。
激活函数就像神经元里的“开关”或“阀门”:当一个神经元收到信号(即上一层的加权和)时,激活函数决定它“放行”多少信号到下一层。没有激活函数,神经网络里所有的层都只是简单地叠加和缩放信号——就像把多块透明玻璃叠在一起,光线依然是直线,网络就只能表示线性关系;有了激活函数,信号可以被“扭曲”或“截断”,网络才具备表达各种复杂、非线性的能力。
(由 GPT-o4 给出解释)
激活函数的作用?也可以说为什么要引入非线性变换?引入非线性变换之后为什么模型的表达能力就变强了?
如果没有激活函数,输入就相当于在和一堆矩阵做相乘运算,乘来乘去总是线性的变换(要不然为啥矩阵要叫做线性代数),可以想象成对一个变量 x 反复地乘上一些数字(x→ax),加再多层都和只用一层一样。
还有一个原因,将特征进行非线性映射的另一个用处,可以让输出满足下游任务的要求,将输出的值限制在一定的范围内(特征空间),也能提升模型的性能。
常见的激活函数
| 名称 | 表达式 | 特点 |
| Sigmoid | $$\sigma (x) = \frac {1} {1+e^{-x}}$$ | 输出范围 (0,1),适合二分类;易饱和,梯度消失问题 |
| Tanh | $$\tanh (x) = \frac {e^{x}-e^{-x}} {e^{x}+e^{-x}}$$ | 输出范围 (−1,1),中心对称;同样存在梯度消失 |
| ReLU | $$\max (0,x)$$ | 计算简单,稀疏激活,收敛快;负区间恒为0,可能导致神经元死亡 |
| LeakyReLU | $$\max (\alpha x,x), \alpha \in (0, 1)$$ | 对负区间保留小斜率,解决 ReLU 死神经元 |
| ELU | \(x>0时:x\) \(x \le 0时:\alpha (e^{x}-1)\) | 负区间平滑、输出均值更接近零,收敛更稳定 |
| Softmax | $$\frac {e^{x_i}} {\Sigma_{j}e^{x_j}}$$ | 将向量映射为概率分布,多分类输出常用 |
| GELU | $$x\Phi (x) $$ | Transformer 中常用,平滑又具备自正则化特性 |
| Swish | $$x\sigma (x) $$ | 比 ReLU 更平滑,实验证明性能略优 |
损失函数(Loss Function)
模型在完成加工后会得到一份输出 \( \hat y \) ,用该输出和真实的标签进行误差的计算,我们希望模型的输出和真实标签之间越接近越好,所以神经网络训练时,会尽可能让损失函数的值小,一般求出整个训练集的损失再求期望,然后最小化这个值。
损失函数就像考试中的“分数”,用来衡量模型的“答题”结果(预测)跟“正确答案”之间差了多少。分数越低,说明模型表现越好;分数越高,说明模型和你期望的结果差距越大。训练神经网络的过程,就是不停地“批改考试卷”——根据损失分数调整模型参数,让它下一次答题时更接近满分。
(由 GPT-o4 给出解释)
如何最小化?通过反向传播计算梯度,再用诸如梯度下降的方法去优化参数。
反向传播(Backpropagation, BP)
根据得到的损失值,回过头去计算各个神经元的误差。通过损失计算每层参数的梯度,再利用梯度下降等优化方法更新神经元的权重和偏置参数。
由损失值 \( \mathcal{L} \) 计算参数 \( \omega \) 的梯度涉及导数的链式法则,比如第 \( z – 1 \) 个神经元的参数 \( \omega_{z-1} \),先影响到第 \( z \) 个输出层神经元的输入 \( \beta \),再影响到其输出值 \( \hat y \) ,最后影响到损失函数值,这个过程有:
$$ \frac {\partial \mathcal {L} } {\partial \omega_{z – 1}} = \frac {\partial \mathcal {L} } {\partial \hat {y}} \cdot \frac {\partial \hat {y}} {\partial \beta} \cdot \frac {\partial \beta} {\partial \omega_{z}} $$
(来自周志华的《机器学习》一著。回顾这部分时仍然花了很多时间才稍微理解一点)
求得梯度后,按梯度的反方向在给定的学习率下对参数进行更新:\( \theta \gets \theta – \nabla \theta \)。而不同的更新方式又涉及到不同的优化算法。
优化器(Optimizer)
随机梯度下降(Stochastic Gradient Descent, SGD)
最基本的优化器,更新参数时每次只用一小批样本计算梯度:
$$ \theta \gets \theta – \eta \nabla_{\theta} $$
经典而简单,但容易卡在梯度较小的点或局部最优点。
带动量的 SGD(SGD with Momentum, SGDM)
当前梯度方向能由过往的方向和当前梯度共同决定:
$$ \begin{align} \theta &\gets \theta – v, \\ v &\gets \alpha v + \eta \nabla_{\theta} \end{align} $$
相当于为参数加上了“惯性”,在遇到下坡时,提升收敛速度;遇到低谷时,模型也会尝试再往前走一点,平滑更新+加速收敛。(不过额外引入了动量系数,多一个参数需要调)
自适应梯度下降(AdaGrad 和 RMSProp)
AdaGrad 优化算法就是在每次使用一个 batch size 的数据进行参数更新的时候,算法计算所有参数的梯度,那么其想法就是对于每个参数,初始化一个变量 s 为 0,然后每次将该参数的梯度平方求和累加到这个变量 s 上,然后在更新这个参数的时候,学习率就变为:
$$ \frac {\eta} {\sqrt{s + \epsilon}} $$
\(\epsilon\) 是一个极小的正数,防止分母为 0 用的。如果一个参数的梯度一直都非常大,那么其对应的学习率就变小一点,防止震荡,而一个参数的梯度一直都非常小,那么这个参数的学习率就变大一点,使得其能够更快地更新。(但是这个时候又会导致学习率衰减过快,训练后期几乎停止)
(上述部分参考自:【快速理解Adagrad】通俗解释Adagrad梯度下降算法-CSDN博客)
RMSProp 在 AdaGrad 的基础上又做了进一步修改,得到最新的梯度后并不是直接平方后加到原来的 s 上,而是和原来的 s 进行加权求和。假设最新求得的梯度为 \(g_t\),s 的更新方式就变为:
$$ s_{t} = \beta s_{t-1} + (1-\beta) g_{t}^{2} $$
其他还是和 AdaGrad 一致。这样就能在自适应调节学习率的基础上,保持长期与近期梯度信息的平衡,适应性更佳。但引入新的超参数 \(\beta\) 又让调参的难度上升。(默认取 0.9)
Adam 与 AdamW
Adam 结合了 SGDM 和 RMSProp 的优势,既引入了动量,又引入了自适应更新。首先是引入了动量,其梯度更新(不是学习率)变成了这样:
$$ \theta_{t} \gets \theta_{t-1} – \frac {\eta} {\sqrt{\hat{v}_{t} + \epsilon}} \hat{m}_{t} $$
其中的 \(\hat{v}_{t}\) 和 \(\hat{m}_{t}\) 都会随着训练而自行调整。先看不带帽子的 \({v}_{t}\) 和 \({m}_{t}\) :
$$ \begin{align} v_t &= \beta_1 m_{t-1} + (1-\beta_1) g_{t}^{2}, \\ m_t &= \beta_2 m_{t-1} + (1-\beta_2) g_t \end{align} $$
\({v}_{t}\) 对 \(g_{t}\) 求平方, \({m}_{t}\) 没有对梯度求平方, \({v}_{t}\) 和 \({m}_{t}\) 都会和上一时间步的 \({m}_{t}\), \({v}_{t}\) 做加权求和。
但这两个值在训练初期会往 0 靠近,所以又给 \({v}_{t}\) 和 \({m}_{t}\) 做偏差校正:
$$ \begin{align}\hat{v}_{t} &= \frac {v_t} {1-\beta_{1}^{t}}, \\ \hat{m}_{t} &= \frac {m_t} {1-\beta_{2}^{t}}\end{align} $$
分母的 \( \beta_{*}^{t} \) 是对超参数求 t 次方。这样在训练初期的学习率就上去了,而训练后期学习率减少,允许模型做细致的探索。
这里需要注意,\(g_{t}\) 是带 L2 正则化的梯度,会在损失函数里加上 \(\frac{\lambda}{2}\left | \theta \right |^2\) ,然后导致 \(g_{t}\) 里多一项 \( \lambda\theta \):
$$ g_t = \nabla_{\theta} + \lambda \theta $$
AdamW 的思路很简单,把加在 \(g_{t}\) 上的权重拿出来,改为直接加在最后的权重更新步骤上,这时候的 \(g_{t}\) 就是 \(\nabla_{\theta}\),然后求 \({v}_{t}\) 和 \({m}_{t}\)(加个权 α),最后再进行权重衰减:
$$ \theta_t \gets \theta_{t-1} – \eta \left( \alpha \frac {1} {\sqrt{\hat{v}_{t} + \epsilon}} \hat{m}_{t} + \lambda \theta_{t-1} \right) $$
原来 Adam 中 λ 会同时影响衰减和自适应计算,但 AdamW 只影响最后的衰减步骤,不会干扰梯度的自适应比例计算。(看了半天 AdamW 觉得蒙蒙的。。。复杂但好用)
关于不同优化器的可视化比较(NAG 和 Momentum 类似,Adadelta 和 RMSProp 类似):
正则化技巧
Dropout
简单地说就是让模型在训练时随机让一部分神经元“休息”,强迫所有神经元都掌握到知识。
说是休息,实际上只是这些神经元的输出被屏蔽掉了(神经元:我上早八)。
对每一层的激活后的输出加一个服从伯努利分布的随机掩码,以概率 p 让神经元的输出为 0,然后对剩下有效的输出除以 (1 – p) 保持期望一致(不然整体期望会变小)
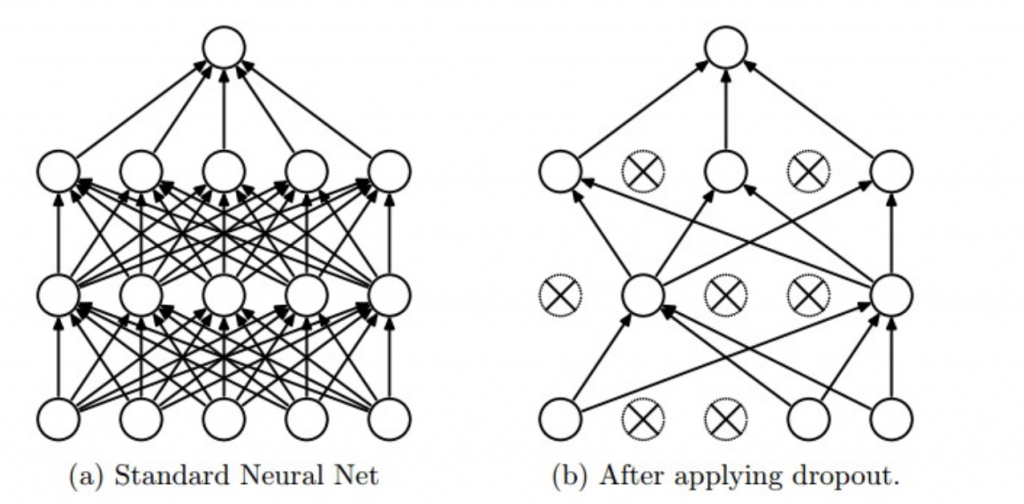
加 Dropout 的目的就是防止过拟合,提升模型的泛化能力,让模型学到更分散的信息表示,不会把所有重任压在少数神经元上。默认的 Dropout 率是 0.3~0.5,输入层要更低一些,输出层不要做 Dropout。
Dropout也不是万能的,在 BatchNorm 的后面使用 Dropout 需要谨慎考虑,对输出用两种正则化真的会提升性能吗?
对于序列敏感型的模型(如 Transformer)随机屏蔽神经元也有可能破坏掉时序信息。
而且Dropout 会减慢模型的收敛速度,这个也需要考虑。
权重衰减(Weight Decay)
在原来的损失基础上增加一个 L2 正则化项,反向传播的时候梯度后面就会加一项 \( \lambda \theta \),最后会影响参数的更新:
$$ \theta \gets \theta – \eta(\nabla_\theta + \lambda \theta) = (1-\eta\lambda)\theta – \eta\nabla_theta $$
可以看到相当于对原来的参数按比例进行收缩,把那些很大的权重往回拉一些,减少极端权重带来的不稳定梯度,也是一种正则化策略。
批归一化(BatchNorm)和层归一化(LayerNorm)
归一化,即减均值再除以方差,但是 BatchNorm 和 LayerNorm 求均值和方差的方式不一样,BatchNorm 针对的是这一批特征张量的每个通道,LayerNorm 针对的是这一批特征张量的每个特征,看下面这张图片:
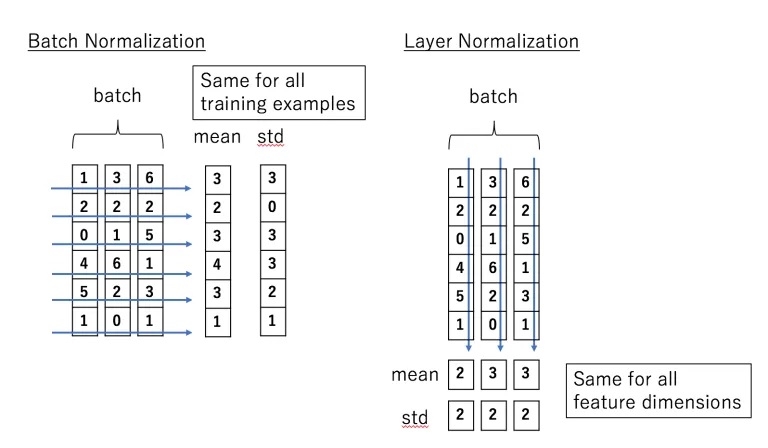
公式不列了,BatchNorm 和 LayerNorm 各有各的优点和适用范围。
因为 BatchNorm 是对所有特征的同一个通道做归一化,所以会抹掉不同特征之间的大小关系。
(想象班上考了五次试,最高分分别是100,90,80,70,60,然后老师分别把每次考试所有学生的分数求归一化,这个时候这五次考试的最高分之间并没有什么可比性,都是 1 了)
如果模型的任务对特征间的大小关系没有特别的依赖(数据没有时序关联),就可以使用 BatchNorm,比如图像分类、目标检测、语义分割。而且 BatchNorm 的执行效率更高,适合大 Batch 训练。但是 Batch 很小的时候会导致 BatchNorm 不稳定,而 LayerNorm 就更合适。
再看到 LayerNorm,因为它是对每条特征做归一化,所以就保留了不同特征间的大小关系。
(还是想象班上考了五次试,这次老师把每个学生的五次考试分数分别进行了归一化,这个时候这五次考试的最高分就有区别了,因为可能被放在不同的学生身上并归一化,并不都是 1 了)
LayerNorm 适合变长序列和小 Batch 训练,能保持序列内部不同位置间的大小关系,可以用在需要处理语音、文本流的模型,比如注意力模型、Transformer。